- Егор ЯценкоИнженер-разработчик
- Валерий НовиковНаставник проекта
- Михаил БыстровКапитан
Инженер-программист
В нефтедобывающей промышленности, при очистке нефтяных резервуаров, широко применяются ручные и маломеханизированные технологии. Однако, данные методы имеют существенные недостатки, связанные с промышленной и экологической безопасностью, вредным воздействием углеводородов на здоровье людей, производящих очистку резервуаров, а также низкой технологической эффективностью. Наша команда создала автоматизированного робота, помогающего очищать нефтехранилища от шлама.
Плюсы:
• Отработанная технология
Минусы:
• Пониженная маневренность
• Ограничение передвижения по высоте шлама
• Затрудненность очистки робота по окончании работы
CleanCo Systems robotic industrial tank cleaner
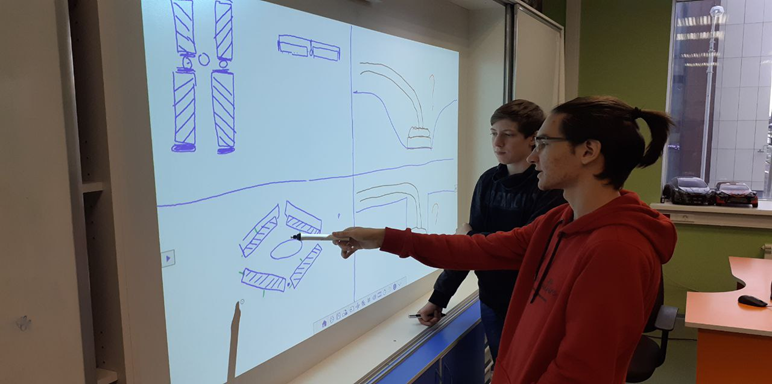
- 1Разработка принципа работы прототипа робота
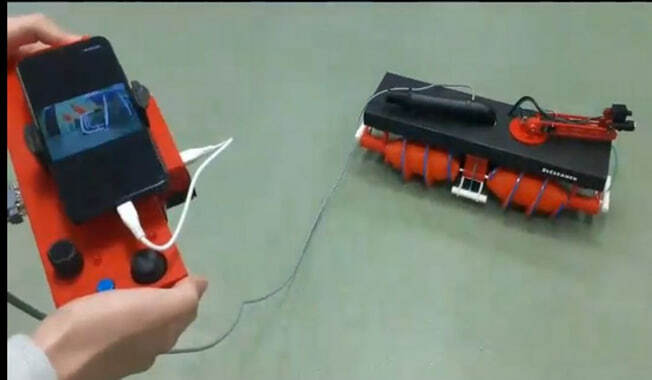
Изучив конструкции аналогичных роботов и определив их достоинства и недостатки, мы спроектировали и создали свой ходовой прототип, который, по нашему мнению, обладает рядом преимуществ перед аналогами.
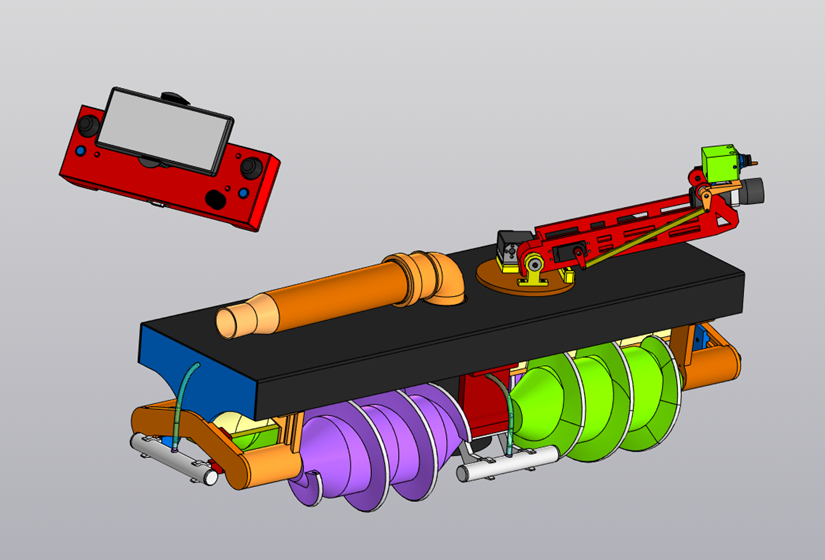
- Замена гусеничного хода на двигатель, состоящий из 4 шнеков.
- Снятие ограничения по высоте слоя шлама.
- Применение шнеков так же значительно упрощает процедуру очистки робота по окончанию работ.
- Значительное улучшение маневренности аппарата и упрощение работы оператора с ним.
- Включение передних и задних шнеков навстречу друг другу будет способствовать перемещению суспензии, состоящей из шлама, воды и химического реагента к центру робота, где находится сопло для ее откачки.
- Три режима уборки:
1.Во время черновой уборки робот просто стоит на месте со включенными шнеками, которые гонят весь шлам в середину, где в свою очередь установлено всасывающие сопло, а также на боковые и передние сопла подаётся водный раствор с реагентами.
2.При чистовой обработке шнеки начинают работать как колеса. Робот перемещается по дну емкости и собирает оставшуюся жидкость после черновой очистки. В это время так же под давлением подается водный раствор.
3.В третьем режиме уборки, робот может перемещаться на поверхности шлама во всех направлениях, что позволяет ему включать черновой режим уборки в любой точке резервуара, а также с легкостью смывать остатки шлама со стенок
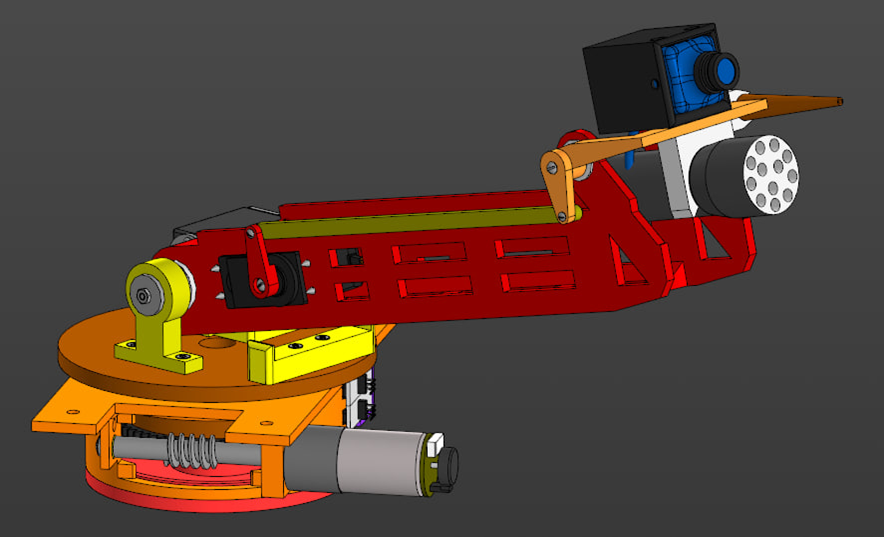
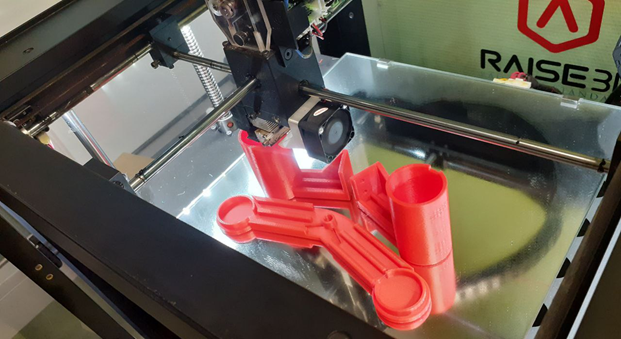
- 2Создание 3D моделей и их изготовление
Разработка и создание 3D моделей механизмов и деталей производилась в программе КОМПАС - 3D. Печать производилась на 3D принтере Raise3D N2 безопасным пластиком PLA.
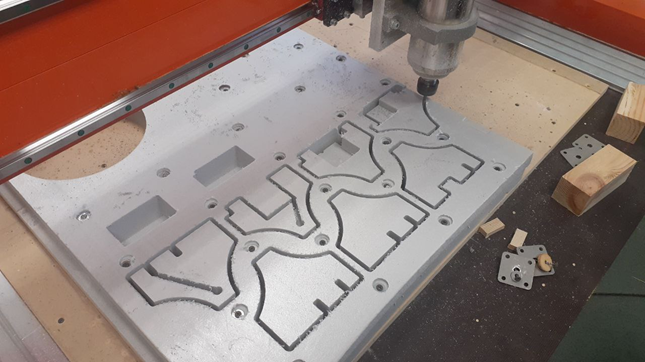
Корпус нашего робота:
- выполнен из фанерных элементов, изготовленных на станке лазерной резки, обеспечивающих необходимую жёсткость и возможность крепления навесных элементов;
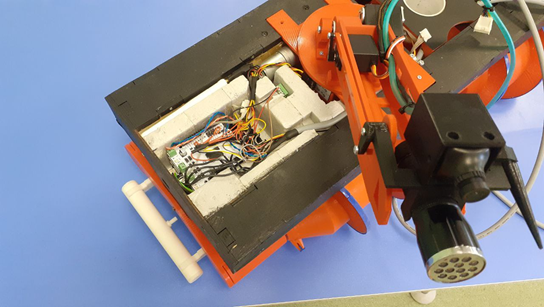
- заполнен пенопластовыми вкладышами, в которых изготовлены ниши для пучков проводов, платы управления, шлангов подачи раствора;
- обклеен карбоном для придания общей жёсткости, водостойкости и стиля.
- 3Сборка и программирование
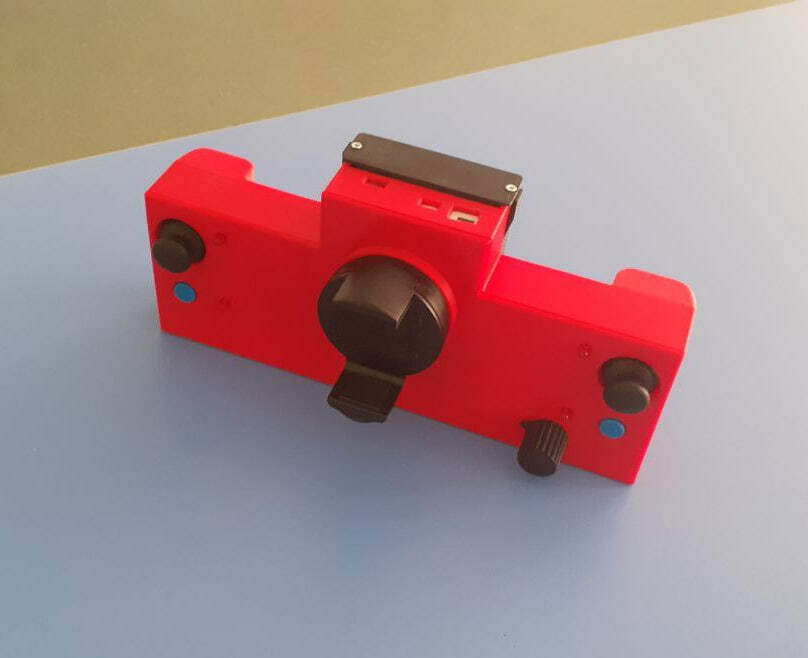
Создав все детали робота, мы соединили их в единую конструкцию и запрограммировали контроллер Arduino Nano для пульта и Arduino Mega для самого робота, передача сигнала от пульта к роботу осуществляется по проводу с помощью технологии Serial порта.


- Длина 830 мм
- Ширина 330мм
- Высота 312 мм
- Вес 6,5 кг
- Мощность 72 Ватта
- Макс скорость 28 м/мин
- Масштаб 1:1,6

Обратная связь
valeri21@mail.ru
mikhail-bystrov@internet.ru