киберперчатка
Перчатка для более простого и интуитивного управления вашим компьютером
Команда проекта
- Коршунов СерафимИнженер, создатель проектаРазрабатывал идею и план создания, собирал, испытывал и создавал проект
- Константин НиколаевичНаставник проектаДавал ценные советы, и участвовал в работе в самые трудные моменты
Проблема
- Компьютерная мышь не позволяет управлять курсором на расстоянии без использования твердой поверхности.
- Пульт (Аэромышь) имеет ограниченный функционал в управлении курсором.
- Людям с ОВЗ и инвалидам сложно управлять джойстиками и манипуляторами.
- Использование курсора мыши может быть неудобным или не интуитивным в некоторых случаях
Актуальность
Изучив недостатки имеющихся устройств, мы пришли к выводу: необходимо расширение возможностей управления курсором на любом экране умной панели или компьютера.
Изучив недостатки имеющихся устройств, мы пришли к выводу: необходимо расширение возможностей управления курсором на любом экране умной панели или компьютера.

Обзор аналогов
Аналог
Функциональность стоимость и доступность
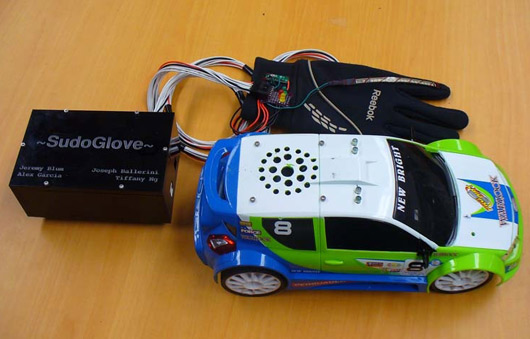
Перчатка SudoGlove студента Джереми Блюма

Перчатки HapitX Gloves GL для глубокого погружения в VR
Проект Джереми Блюма нужен для управления машинкой на радиоуправлении. Стоимость проекта мала, однако перчатка может управлять только одной машиной, одного вида и модели.
Проект направлен на более глубокое погружение в мир VR и AR. Однако из-за сложной технологии передачи тактильных ощущений его цена достигает примерно 900000 руб.
Цели и задачи проекта.
Основная цель проекта - сделать работу с приложениями на экранах умных устройств более удобной и не обязывающей при необходимости искать «мышь» на столе.
Другие цели:
- возможность использования устройства при необходимости вместо обычных компьютерных мышей, как более удобный и интуитивный аналог,
- использование этой технологии в VR системах, при управлении роботов и тд.
- создание электронного устройства удобного для использования людьми с ОВЗ и инвалидностью
Внутренние стейкхолдеры
МАУ ДО «Детский технопарк «Кванториум»
МАУ ДО «Детский технопарк «Кванториум»
Внешние стейкхолдеры
- Лекторы
- Ведущие мероприятий
- Операторы роботов и БПЛА
- Люди с ОВЗ и инвалиды
Поэтапное описание создания проекта
1
Идея
- Зарождение идеи проекта
- Оценка идей и создание критериев проекта
2
Теория
- Создание модульных связей для проекта
- Оценка модулей с критериями проекта
3
Механики
- Пошаговая разработка модульных связей проекта.
- Разработка концепций модулей, проверка их работы и соответствие критериям.
4
Сборка
- Сборка тестового продукта
- Оценка тестового продукта по критериям
5
Идеал
- Сборка прототипа по выводам из тестовой части
6
Презентация
- Презентация готового проекта стейкхолдерам.
Экономические аспекты проекта
Все радиодетали, модули, контроллеры и вообще все обошлось мне в 2700руб.
Когда проект будет закончен планируется создать сайт про этот продукт и разместить его страницу на маркетплейсах.
Все радиодетали, модули, контроллеры и вообще все обошлось мне в 2700руб.
Когда проект будет закончен планируется создать сайт про этот продукт и разместить его страницу на маркетплейсах.
Результаты
На данный момент мой проект находится в стадии завершения. Сейчас я могу эмулировать полноценную мышку на своем проекте. Также имеется возможность спокойно симулировать мышь как ПК так и на умной доске.
В будущем планируется добавить в первую очередь возможность беспроводной передачи данных (эта функция находится в тестовом режиме). Далее я добавлю корпус, а в конце улучшу этот сайт.
На данный момент мой проект находится в стадии завершения. Сейчас я могу эмулировать полноценную мышку на своем проекте. Также имеется возможность спокойно симулировать мышь как ПК так и на умной доске.
В будущем планируется добавить в первую очередь возможность беспроводной передачи данных (эта функция находится в тестовом режиме). Далее я добавлю корпус, а в конце улучшу этот сайт.
Включение ролика в интернете с помощью моего проекта.
Технические характеристики
Для создания USB-симулирования используется аналог Arduino Leonardo, а именно Arduino Pro Micro. Вот примерный код для такого подключения и передачи данных от акселерометра и кнопки через радиомодуль (проще говоря код использованный на перчатке):
Wire.begin();
Wire.beginTransmission(MPU_ADDR); // Начать связь с MPU6050
Wire.write(0x6B); // Регистр питания
Wire.write(0); // Включить MPU-6050
Wire.endTransmission(true);
Mouse.begin(); // Инициализация мыши
int mass[6];
mass[1] = 7;
mass[2] = 8;
mass[3] = 0;
mass[4] = 0;
mass[5] = 0;
mass[6] = 0;
Wire.beginTransmission(MPU_ADDR); // Начать связь с MPU6050
Wire.write(0x3B); // Начать считывание данных с акселерометра
Wire.endTransmission(false); // Повторное начало связи
// Конвертировать значения осей в перемещение мыши
mass[3] = map(accelerometer_x, -17000, 17000, -mouseSpeed, mouseSpeed);
mass[4] = map(accelerometer_y, -17000, 17000, -mouseSpeed, mouseSpeed);
readButton(button1,MOUSE_RIGHT);
readButton(button2,MOUSE_LEFT);
// Двигать мышью
radio.write(mass, sizeof(mass));
}
void readButton (int pin, char mouseCommand){
if (digitalRead(pin) == HIGH) {
if (pin == 7){
mass[1] = 1;
}
if (pin == 8){
mass[2] = 1;
}
}
Wire.begin();
Wire.beginTransmission(MPU_ADDR); // Начать связь с MPU6050
Wire.write(0x6B); // Регистр питания
Wire.write(0); // Включить MPU-6050
Wire.endTransmission(true);
Mouse.begin(); // Инициализация мыши
int mass[6];
mass[1] = 7;
mass[2] = 8;
mass[3] = 0;
mass[4] = 0;
mass[5] = 0;
mass[6] = 0;
Wire.beginTransmission(MPU_ADDR); // Начать связь с MPU6050
Wire.write(0x3B); // Начать считывание данных с акселерометра
Wire.endTransmission(false); // Повторное начало связи
// Конвертировать значения осей в перемещение мыши
mass[3] = map(accelerometer_x, -17000, 17000, -mouseSpeed, mouseSpeed);
mass[4] = map(accelerometer_y, -17000, 17000, -mouseSpeed, mouseSpeed);
readButton(button1,MOUSE_RIGHT);
readButton(button2,MOUSE_LEFT);
// Двигать мышью
radio.write(mass, sizeof(mass));
}
void readButton (int pin, char mouseCommand){
if (digitalRead(pin) == HIGH) {
if (pin == 7){
mass[1] = 1;
}
if (pin == 8){
mass[2] = 1;
}
}
Контакты Коршунова Серафима:
Телефон: 8 985 631 63 95
Почта: serafimkorshunov@gmail.com
Телефон: 8 985 631 63 95
Почта: serafimkorshunov@gmail.com
Контакты Константина Николаевича:
Телефон: 8 967 062 63 10
Почта:
Телефон: 8 967 062 63 10
Почта: